
PRo3D - Dynamic multi-scale planetary surface 3D analysis
Gerhard Paar, JOANNEUM RESEARCH, Graz
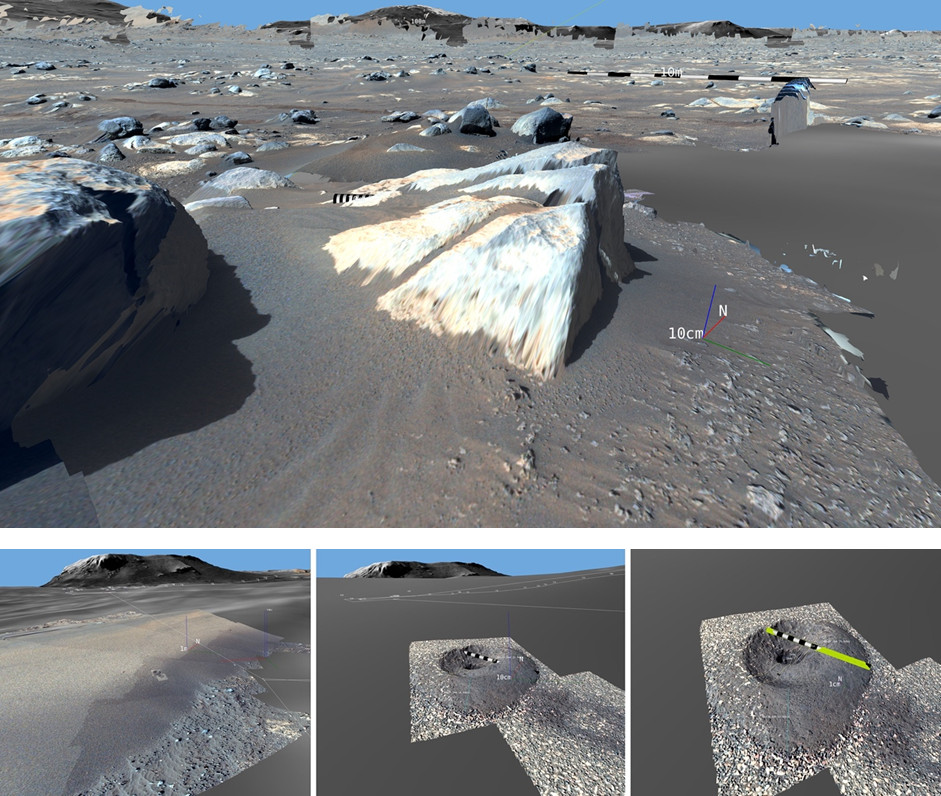
Tactical and strategic tasks in planetary exploration rely on context awareness for Rover navigation and utilize 3D data products for visualization. Tools visualizing these data sets at various levels of detail are useful for translating and interpreting planetary scenery to scientists and engineers, who benefit from the ability to navigate in a repeatable manner. For this purpose, we provide a strategy and solution for the so-called “Sequenced Bookmarks” capability of the Planetary Robotics 3D Viewer PRo3D which enables recording the exploration and analysis of a scene by defining states (sequenced bookmarks). They incorporate the view, visibility of scene objects and graphical annotations and are arranged in a specific order. Users either re-play them interactively or assemble story-telling videos by offline rendering to present a scientific interpretation based on the 3D data. We report on the workflow and demonstrate several use cases from Mars 2020 Mastcam-Z images, wherein 3D vision scientific products are generated. These use cases scenarios include an immersive experience, wherein geologic interpretations and science rationale can be assembled within minutes.
Gerhard Paar
Gerhard Paar leads the Space robotics & Instruments Team in the JOANNEUM RESEARCH Institute for Information and Communication Technologies (DIGITAL) in Austria, with 35 years of experience in the field of computer vision, digital photogrammetry and space exploration. He holds a diploma engineering degree for technical mathematics at the Technical University of Graz. Gerhard coordinates the ExoMars PanCam 3D Vision Team and coordinated the EC FP7-Space Projects PRoVisG, PRoViScout and PRoViDE, and the FP7-SME Project De-Montes. He leads the development team for the photogrammetric & laser-scan based tunnel metrology system Dibit, one of the first fully automatic industrial close-range photogrammetry systems for non-expert users world-wide. He acts as project manager of ESA and nationally funded space-related projects and Co-Investigator for ExoMars PanCam and CLUPI, and for Mars 2020 Mastcam-Z.
Recent results of the NASA Curiosity and Perseverance rovers
Prof. Sanjeev Gupta, Imperial College London
The history of water and surface environments on early Mars is encoded in the planet’s sedimentary rocks. On-the-ground analysis of sedimentary strata are required to robustly characterise the specific nature of early Mars palaeoenvironments.The traverses made by the Curiosity and Perseverance rovers offer us remarkable windows into past environmental change on Mars across two separate temporal transects. In this talk I will summarise recent results from the exploration of the two rovers and discuss implications for hydrological evolution on Mars and the search for evidence of past life. The Curiosity rover is exploring the lower slopes of Aeolis Mons, a ~5 km tall mound of sedimentary rocks in the centre of Gale crater. Here, I describe how analysis of data from Curiosity tell a story of a transition from wet climates with lakes present in the crater ~3.5 billion years ago to desert environments with occasional lake systems present. The Mars 2020 Perseverance rover is exploring a prominent sedimentary fan deposit at the western margin of Jezero crater – the Western fan – which has been interpreted to be a river delta that built into an ancient lake basin during the Late Noachian-Early Hesperian epochs on Mars (~3.6-3.8 Ga). Perseverance’s traverse across the fan in 2022-2023 provides a remarkable window into a fossilised delta system on Mars with potential to understand Martian landscapes under a markedly different climate to present day.

Sanjeev Gupta
Sanjeev Gupta is an Earth and Planetary Scientist at Imperial College London. He is interested in palaeoenvironmental evolution on planetary surfaces, with specific expertise in deciphering the sedimentary rock record of environmental change and habitability on Earth and Mars. His work with mission colleagues on NASA rovers has led to the discovery of the first in situ evidence for ancient rivers, deltas and lake systems at the martian surface. He is on the science teams and a Long Term Planner (LTP) for NASA’s Mars Science Laboratory Curiosity and M2020 Perseverance rover missions. He is also applying this experience to preparing for Europe’s first rover mission to Mars, the ExoMars Rosalind Franklin rover that will explore ancient clay-bearing sedimentary rocks at Oxia Planum.
Three dimensional field-scale geological analyses of a fluvio-deltaic system in Jezero crater, Mars
Robert Barnes, Imperial College London
Mastcam-Z is a stereo-camera with RGB and multispectral imaging capabilities, and provides the main science eyes for the rover Perseverance’s science team during the traverse up the Jezero western fan towards the western rim of Jezero crater. Such a traverse is occurring to search for samples which may tell us about whether or not ancient life may have existed in the delta-lake system that is theorized to have been present there during either the late Noachian or early Hesperian epochs (~3.7-3.5 billion years ago). Image mosaics and 3D digital outcrop models processed from Mastcam-Z data are used by the science team to analyse the physical dimensions, geometries and distribution of sedimentary rocks encountered in the western fan to help build geological models informed by experience from terrestrial geological analogues. The aim is to characterize and reconstruct the ancient environmental processes and conditions. The scaled, georeferenced, stereo reconstructions which are used to build 3D digital outcrop models of outcrops at the Jezero western fan front were processed using the Planetary Robotics Vision Processing tool (PRoVIP) and visualized and measured in the Planetary Robotics 3D Visualisation tool (Pro3D). We will present some examples here of the applications of these 3D visualisation and analysis techniques to understanding ancient sub-aqueous depositional processes on Mars and placing observations from multiple locations into detailed spatial context with each other.

Robert Barnes
Dr. Robert Barnes has a background in terrestrial structural geology, and has worked with planetary robotic image data since 2015, providing geological input into the development of the Pro3D viewer, developed by VRVis, as well as the PRoViP processing tool developed by JR, as well as participating in several rover and camera field trials. The lessons learned in these activities have been applied to testing of the 3D capabilities of the PanCam instrument, which will be onboard the ESA Exomars rover Rosalind Franklin. Since 2022 he has been part of the Mastcam-Z and Science teams on the NASA Perseverance rover, using the 3D processing products for science analysis as well as assisting with Mastcam-Z uplink operations to collect science imaging data.
Dieser Vortrag findet im VRVis, 5. OG, Donau-City-Straße 11, 1220 Wien statt. Eine Anmeldung ist nicht erforderlich.
Um an der Webex-Sitzung teilzunehmen, wenden Sie sich bitte im Voraus an kraft(at)vrvis.at.
Erst wenn Sie auf den Button "Google Maps laden" klicken, wird die Google Map geladen. Dadurch werden persönliche Informationen an Google übertragen und Cookies gesetzt. Diese Einstellung wird für 6 Monate gespeichert.